How are Gaussian Splat scenes created?

TitleFrom photos to 3D: How to create a Gaussian splatting scene
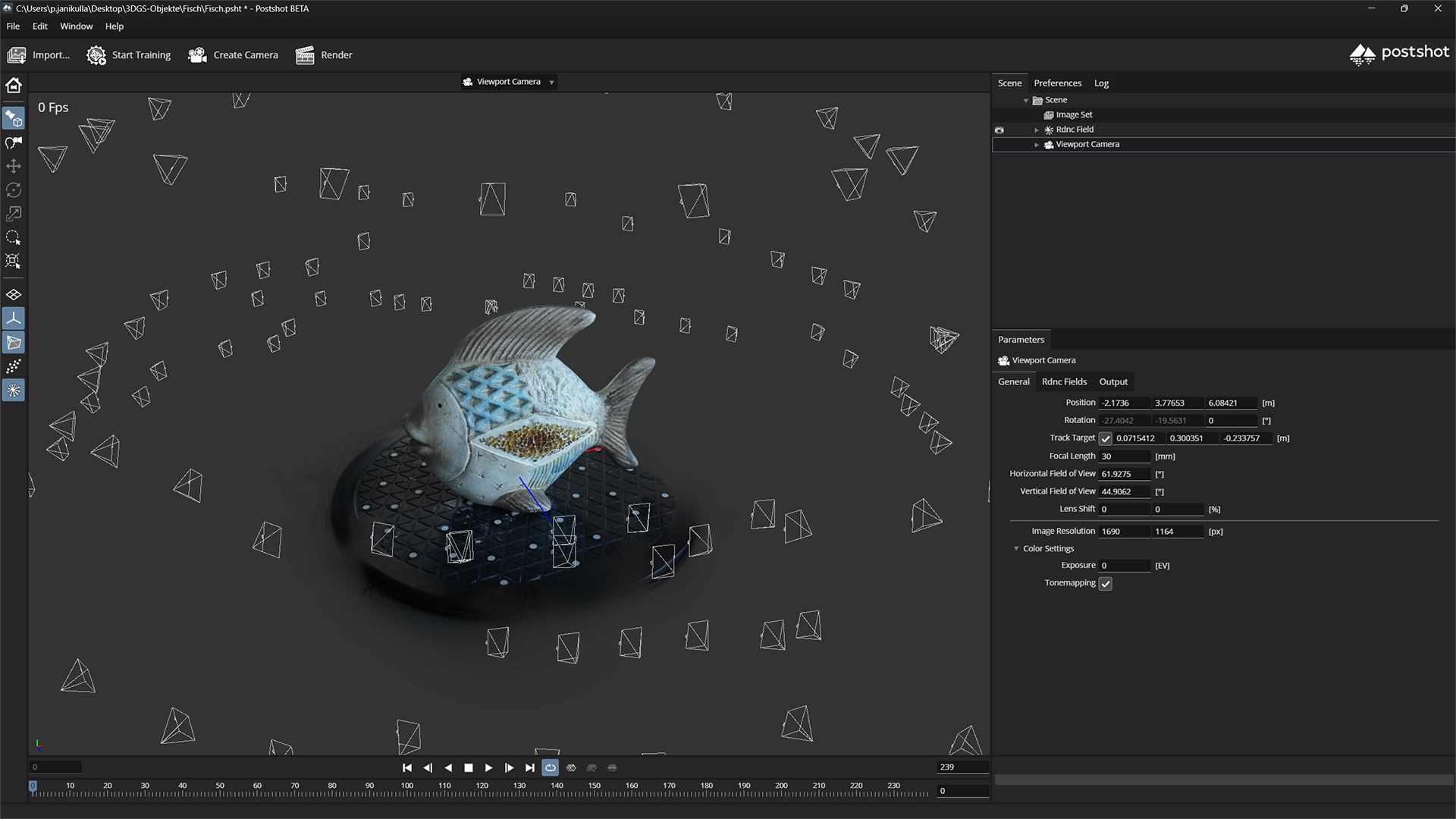
A Gaussian splatting scene is created by transforming many 2D photos into a 3D representation using small, blurred dots (splats) to represent the surfaces and details of a scene. This method can be used for photorealistic 3D representations.
Brief overview:
- Feature recognition and matching
- Structure from Motion (SfM)
- Dense point cloud
- Creation of the Gaussian splats
- Rendering of the Gaussian splats scenes
TitlePreparation/creation of the images
To ensure that the images in a Gaussian splatting scene are optimally processed, a few important points should be observed. Here are a few tips to avoid mistakes in further processing:
- The images should be sharp - a high exposure time helps with this.
- Even lighting ensures consistent results.
- A large overlap between the images improves the 3D reconstruction.
TitleHow to create a Gaussian Splat scene
- Feature recognition and matching - Distinctive points such as edges or corners are first identified for each image. If there are identical features in different images, these features are brought into a relationship with each other. In this way, the system knows which points/features in the images indicate the same object.
- Structure from Motion (SfM) - The camera parameters and 3D data are calculated from the recognised features using SfM, which can then be seen as a 3D point cloud. A point cloud is thus generated from the photos using feature recognition and SfM.
- Denser point cloud - The point cloud can be generated even more densely so that the splats on the point cloud can be displayed in even greater detail. The point cloud is further condensed by the surface details between the feature recognition images.
- Creation of Gaussian splats - When creating the splats, 3D points of the point cloud are converted into blurred points with a Gaussian distribution, whereby the position, colour (image information) and a blur function (Gaussian blur) are calculated for each point in order to create a more realistic and softer representation of the surfaces in the scene.
- Rendering the Gaussian splat scenes - The Gaussian splats are combined and overlapped in the rendering process. The algorithm calculates their interaction to create a seamless and realistic representation of a continuous surface in the scene.
TitleMobile Laserscanner und Gaussian Splatting
Some scanners, such as the Lixel K1 or Lixel L2 Pro from XGRIDS, create image data in addition to the normal point cloud, which can then be used to generate the LCC (Lixel Cyber Colour) data. The great advantage of this is that the scanners can already access a highly accurate point cloud from the LiDAR sensor without having to generate the point cloud from the images first. This not only means better accuracy of the scans, but also faster processing of the Gaussian splat scenes during processing.

Better advice as a user
If you are interested in our offer or would like to find out more about the further processing of XGRIDS scan data, then call us today and arrange a free and non-binding consultation appointment for you. We will answer all your questions. As both a dealer and a user, we are well placed to support you after your purchase.