What is SLAM?

TitleSimultaneous Localization and Mapping
SLAM stands for ‘Simultaneous Localisation and Mapping’ and describes the ability of a system to orientate itself in an unknown environment and map it at the same time. Originating in the robotics industry in the 1980s and 1990s, SLAM quickly developed into a key technology that is now used in many areas such as robotics, surveying and autonomous navigation.
TitleThe creation of SLAM
The main problem of early robotics was to allow autonomous vehicles to navigate through complex environments such as factory floors without relying on external aids such as GPS. SLAM was developed as a solution to allow robots to determine their position in a space while simultaneously mapping that space.
- Origin in the 1980s – SLAM was developed in robotics to allow robots to simultaneously map an unknown environment and determine their position within it.
- Early work – Researchers such as Hugh Durrant-Whyte and John J. Leonard pioneered the development of SLAM algorithms.
- Objective – SLAM solves the problem of uncertainty by using sensors (e.g. cameras, LiDAR) to map the environment and localise the position of an object simultaneously.
- Progress through computing power and sensor technology – With the improvement of sensors and increased computing power in the 2000s, SLAM became increasingly precise and suitable for everyday use, e.g. in drones, robots and autonomous vehicles.
TitleHow SLAM works
SLAM systems use various sensor data to detect the environment and determine their own position within this environment. These sensors can include visual data (e.g. camera images), LiDAR (Light Detection and Ranging), radar or sonar, combined with inertial measurement units (IMUs) for precise positioning. SLAM is an iterative process: the more data a device collects about the environment and moves around in it, the more precise its estimate of its own position and the surrounding map becomes.
TitleVisual SLAM and LiDAR SLAM
Visual SLAM (vSLAM)
Visual SLAM mainly uses visual information, i.e. camera data, for simultaneous localisation and mapping. Cameras capture visual features of the environment and the algorithm uses this to calculate the position of the device. This method is particularly advantageous as cameras are inexpensive and widely available. Visual SLAM is often used in drones, augmented reality devices and autonomous vehicles. However, the disadvantage is that vSLAM is less accurate in poorly lit environments or monotonous visual scenes (without clear features).
LiDAR SLAM
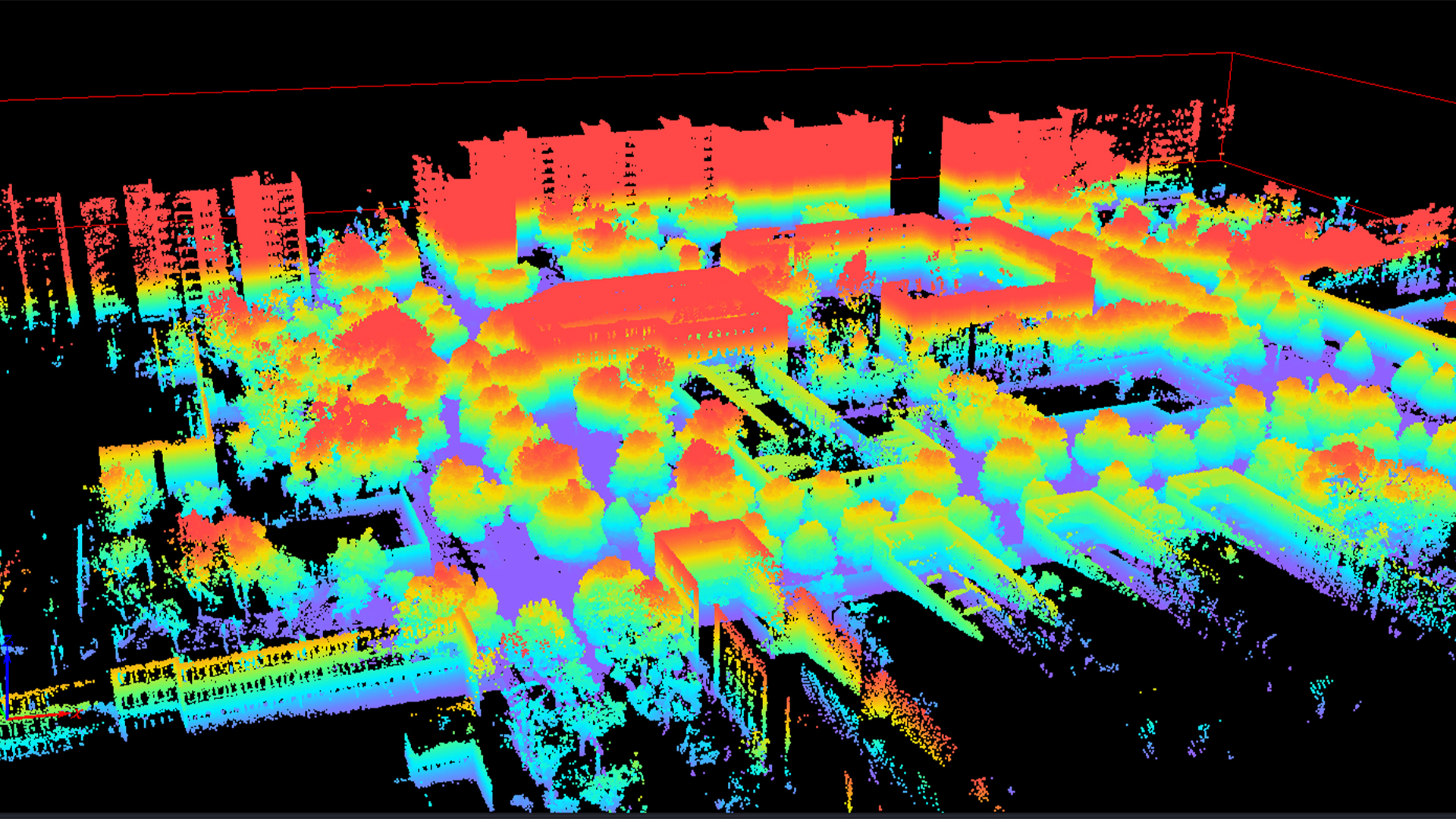
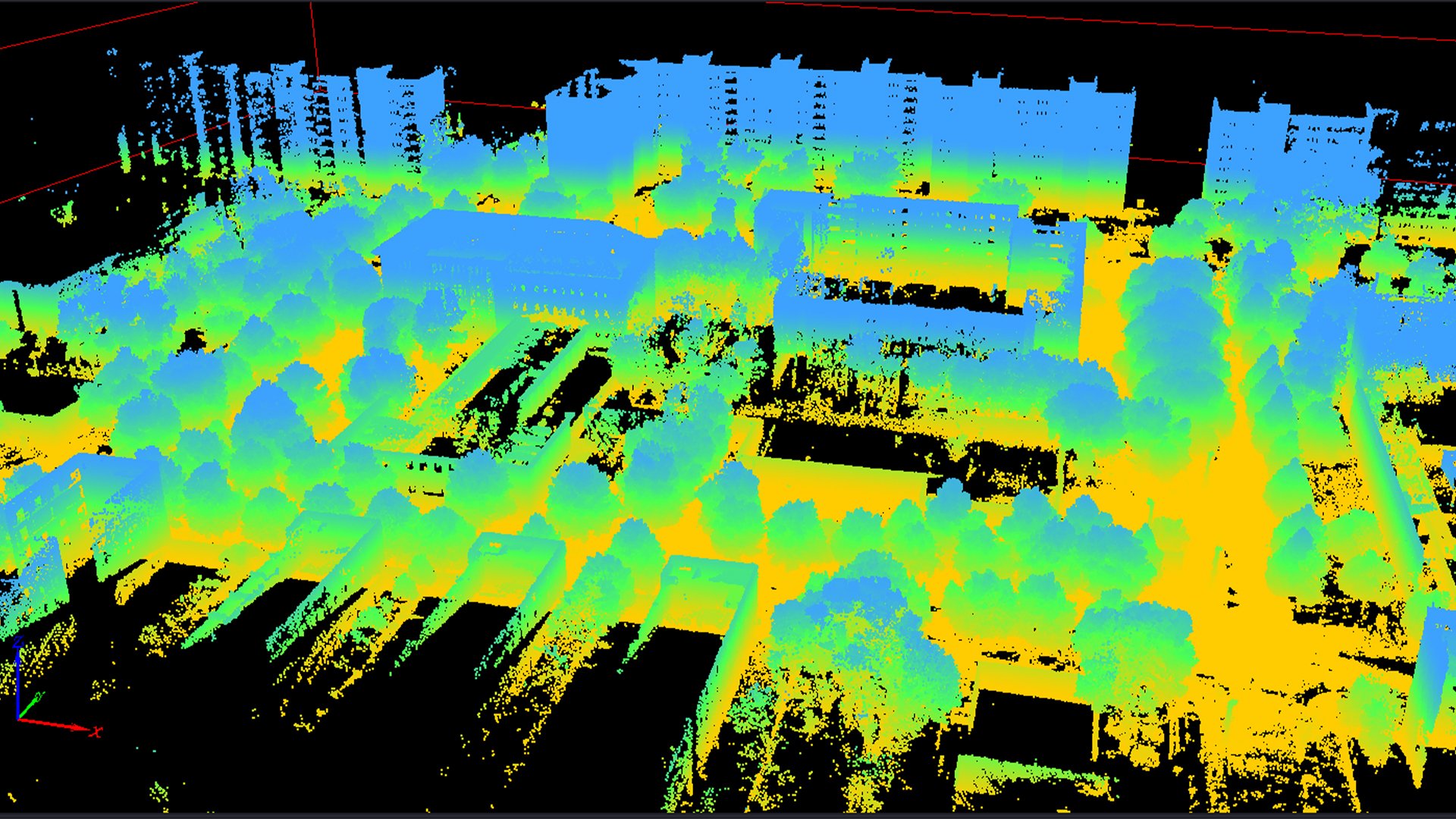
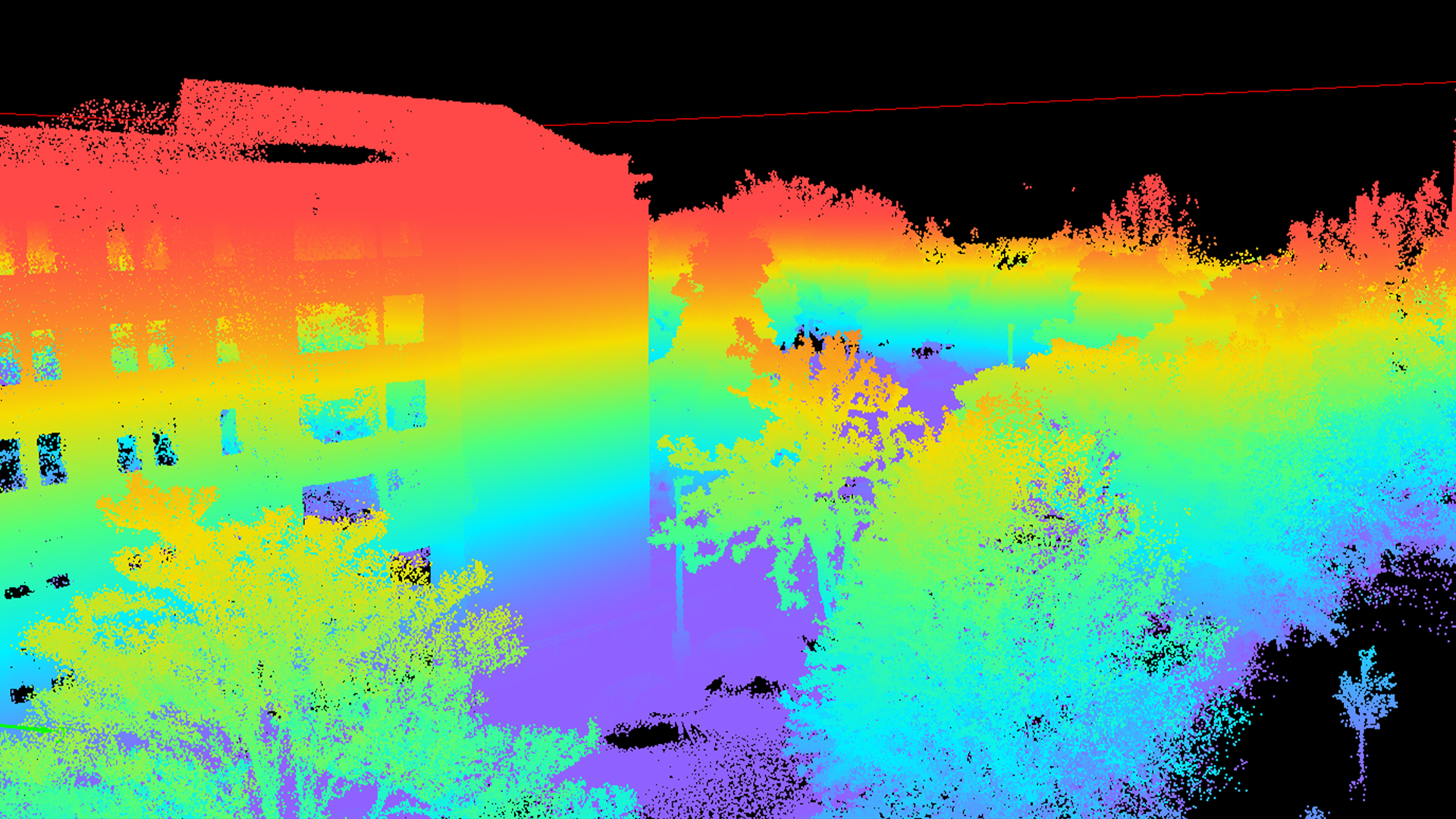
LiDAR SLAM, on the other hand, uses LiDAR sensors to scan the environment. These sensors send out laser pulses and measure the time it takes for these pulses to return. This allows the distance to objects in the environment to be determined very accurately. LiDAR SLAM is particularly useful in environments where visual information is not sufficient, such as in poor lighting conditions or in structurally monotonous areas. This technology is used in surveying, autonomous vehicles and 3D mapping.
TitleVarious SLAM algorithms
SLAM is available in various forms, which are characterised by the use of different sensors and technologies:
- 2D SLAM: This algorithm only maps in two dimensions and is often used in simple indoor environments. It is often used in robotics.
- 3D SLAM: This algorithm is far more complex and enables three-dimensional mapping of the environment. It is particularly important when surveying and mapping larger areas or unstructured areas.
- Visual SLAM (vSLAM): As described above, Visual SLAM uses camera data for mapping and localisation.
- LiDAR SLAM: Relies on precise laser distance measurements to capture the environment in 3D.
- Hybrid SLAM: This is a combination of LIDAR SLAM 3D or 2D and visual SLAM (vSLAM). This method utilises the advantages of both methods. Therefore, the SLAM is very stable and probably the most robust method. However, the hybrid SLAM is technically very complex due to the different accuracies and the integration is therefore more complex. It is therefore still very rarely used.
TitleSLAM in surveying
SLAM algorithms are not only used in robotics, but also increasingly in surveying. This involves the precise mapping of indoor and outdoor areas, whereby the accuracy of SLAM plays a decisive role. While tolerances of several centimetres are acceptable in robotics, maximum precision is required in surveying.
Modern SLAM algorithms, such as the one developed by CSIRO, offer robust and reliable results even in difficult environments, such as repetitive corridors or rooms with moving people.

Features of SLAM
- Mobility: SLAM systems can move freely through the environment and map at the same time, which is particularly useful in areas that are difficult to access or extensive.
- Speed: SLAM captures data continuously and works much faster than static surveying systems, saving time and money.
- Flexibility: SLAM can be used both indoors and outdoors and delivers reliable results in different environments.
- Autonomy: SLAM navigates in real time without GPS and is ideal for indoor, urban or underground environments, increasing the efficiency and safety of autonomous devices.
TitleConclusion
SLAM is a key technology that enables mobile systems to orientate themselves in unknown environments and map them at the same time.
Advances in Visual SLAM and LiDAR SLAM are constantly opening up new application possibilities, from robotics to high-precision surveying.
Nevertheless, the advantages and disadvantages of the various SLAM methods must be carefully weighed up in order to find the best solution for the respective application.
