Point cloud analysis from laser scanners

TitleWhat is a point cloud and how does the point cloud analysis take place?
A point cloud is a collection of very many measuring points for documentation and measurement. This point cloud is essentially generated by laser scanners. These measuring devices work with different capture methods, all of which generate thousands to hundreds of thousands of measuring points per second. This multitude of measuring points, the so-called point cloud, is used to generate and visualize inventory data for a wide variety of areas. Point clouds can contain reflection and color information and thus reproduce a realistic image.
TitleCreation of point clouds
There are various options for creating point clouds. The most commonly used variant is laser scanning. This involves using a laser beam and its reflection to create 3D measurement points on surfaces. Laser scanners achieve recording speeds of up to 2 million points per second.
In the field of laser scanners, a distinction is made between terrestrial and mobile scanning.
TitleMeasurement methods
Terrestrial lase rscanning | Mobile laser scanning | Photogrammetry |
With terrestrial scanning, the measuring device remains unchanged in its position and creates a 360° image of the surroundings from its point of view. In order to be able to map this environment in its entirety, several viewpoints are required, which are linked together. This process is the registration of the scan data. | Mobile scanning is also based on measurement using a laser beam. However, the measurement is carried out in motion, for example when walking or driving. The changes in position are merged into a point cloud using high-precision sensors and a suitable processing algorithm. | The photogrammetric method is also very popular for creating point clouds. By capturing many camera images per second and processing them, precise and large-volume point clouds can also be extracted. This method is mainly used for drone flights (large-volume measurements using UAVs) as well as for handheld scanners (small-volume measurements). Read more about handheld scanners
|
TitleProcessing and analyzing point clouds
The raw data generated during the measurement must first be processed in the software solutions provided for this purpose. Many manufacturers of measuring devices also offer the corresponding software. However, the market for available software is large and the suitability of this depends heavily on the application.
The processing of terrestrial scans consists of generating the point clouds of the individual viewpoints and then linking them to form an overall point cloud.
TitleHow are point clouds analyzed?
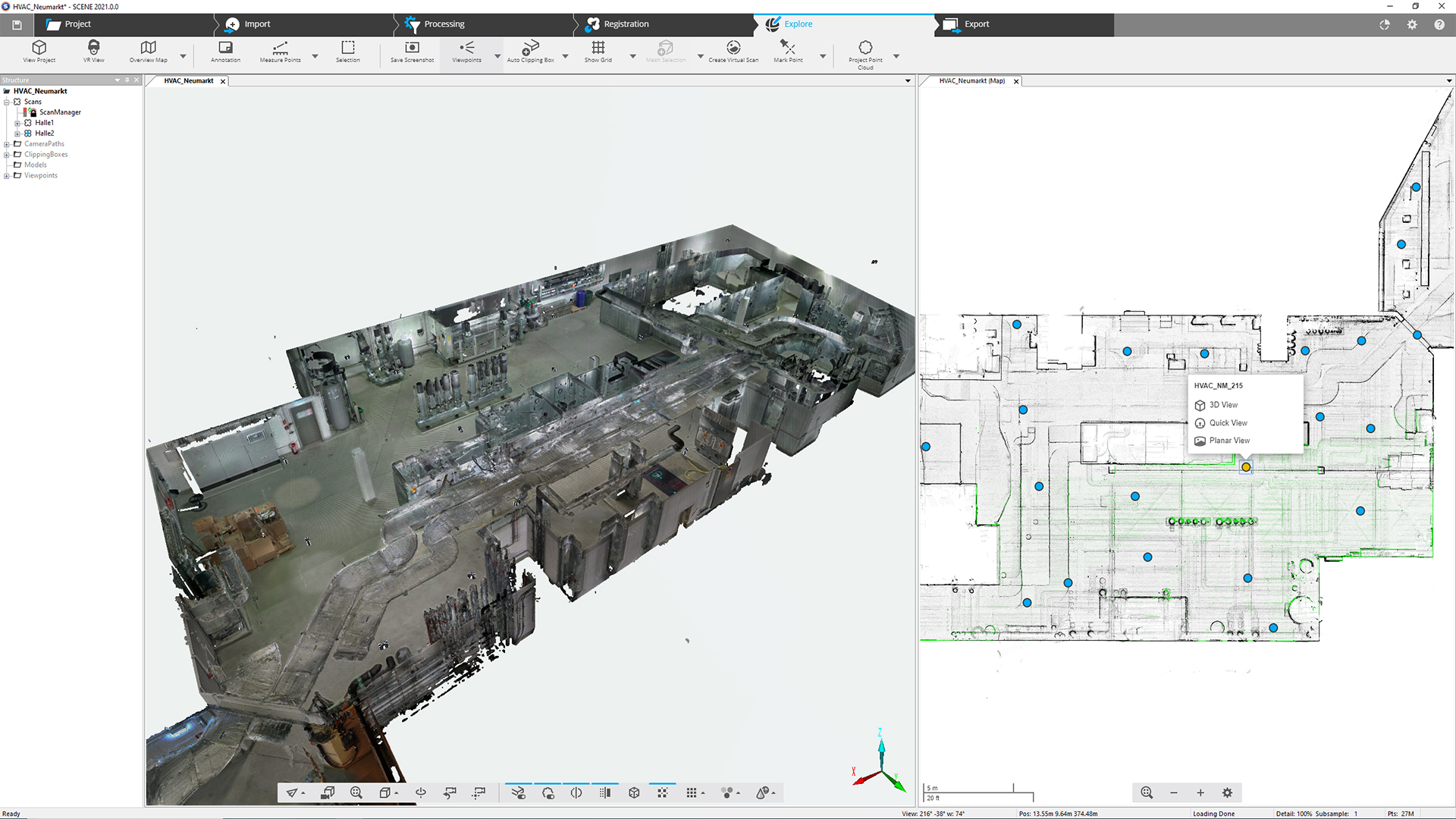
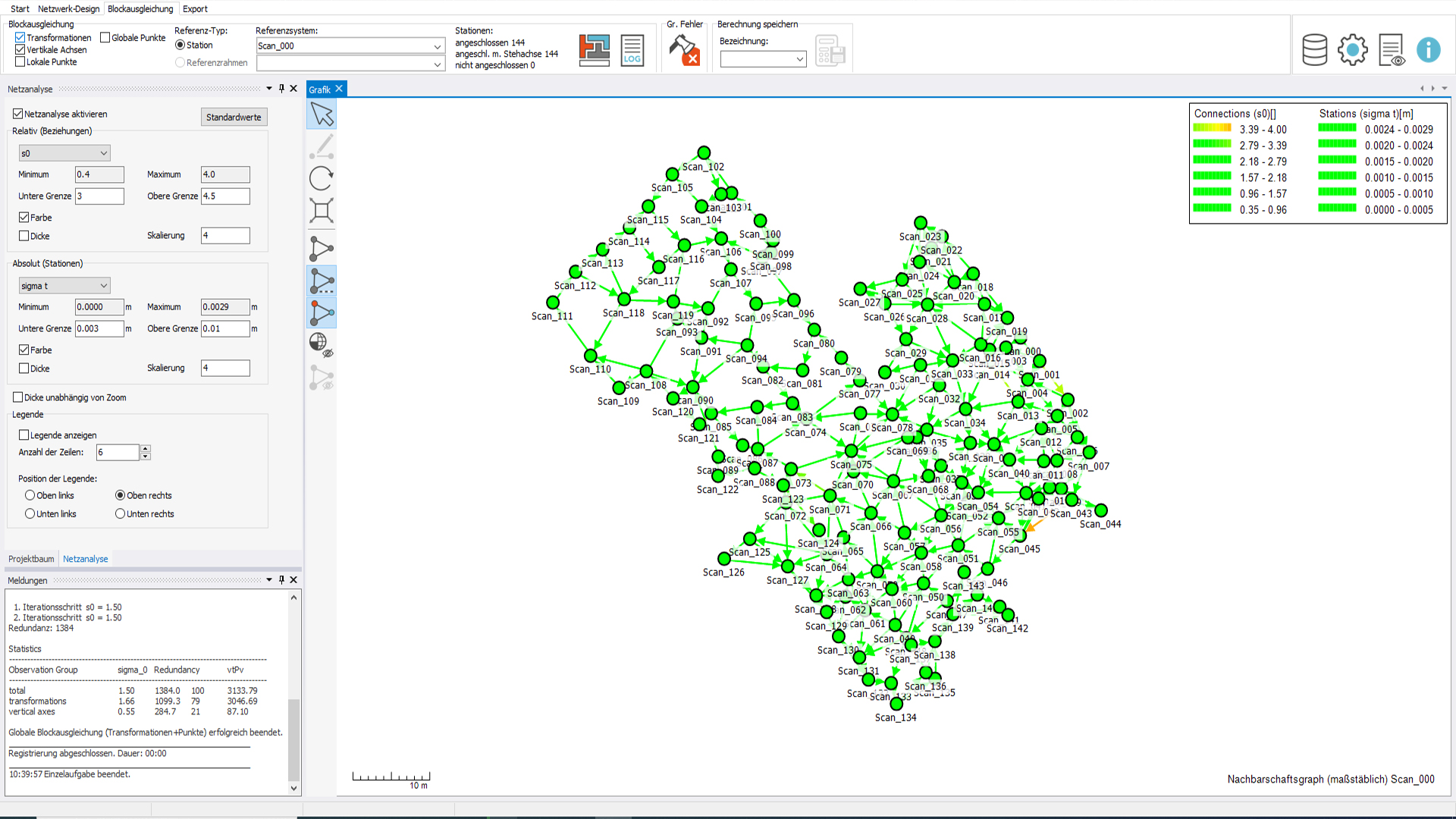
Analysis of terrestrial scans
The trend in analysis is moving towards an automated solution. At the touch of a button, the viewpoints are brought to the correct position and after a certain processing time, the result is available for further processing.
The combination can be made using target markers or the point cloud itself (cloud-to-cloud). Targets (such as reference spheres or checkerboard targets) are distributed in the environment for the measurement and serve as linking points due to their fixed position. This method is very reliable, but also requires a certain amount of care in handling the targets when recording the scans.
The cloud-to-cloud solution is an automated variant in which the software uses the surrounding geometries (natural features) to find the linking points between the scans. Overlapping areas between the viewpoints are used to align the individual scans.
Various software solutions (e.g. PointCab, FARO Scene, Autodesk ReCap, Scantra) can be used and combined with each other for the evaluation of terrestrial scans.
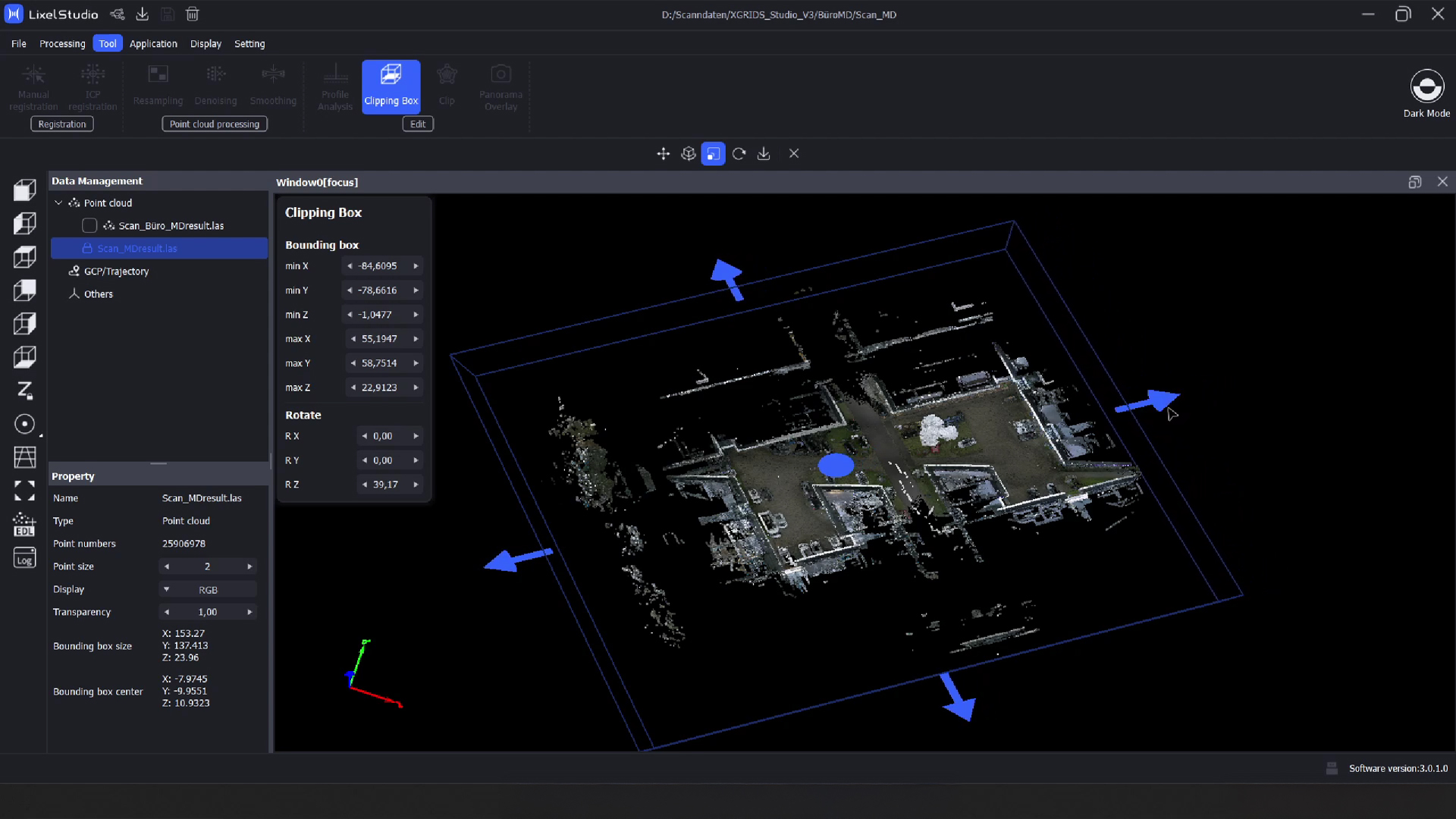
Analysis of mobile scans
Mobile scans bring together various state-of-the-art sensors that generate data during the measurement. This data is imported and processed in dedicated software, usually provided by the manufacturer. Various processing algorithms are used to create the point cloud.
Mobile scans usually do not require target marks for mapping, but work mainly cloud-to-cloud. However, the use of targets enables more accurate results and is particularly advisable in very monotonous, feature-poor scanning environments.
Manufacturers of mobile scanning systems include XGRIDS and FARO.
TitleHow is the point cloud generated from the scan data?
The analysis of images for the creation of point clouds is a very computationally intensive process. Many thousands of raw images are processed in suitable software. The algorithms used are highly complex. Triangular meshes are created from the images, from which the point cloud can then be extracted in a further step.
In some measuring devices that work with this technology, pre-registration also takes place in real time. It is then possible to recognize roughly whether the geometry has been captured.
Using suitable processing tools, the results are made more precise so that a high level of detail and accuracy can be achieved.
TitleFurther processing of point clouds - What options are available?
In most cases, the point cloud is not the end product, but initially the data basis. Depending on the application, the 3D data is processed in different ways. Information can be extracted from the data, but simple measurements can also be carried out.
Create accurate plans based on point clouds | Using point clouds for visualization | Generating data for 3D printing |
A drawing of the affected area is often created for planning purposes. The point cloud serves as a design basis for 2D drawings and 3D models. A CAD model is created that serves as the basis for a wide range of subsequent work. The point cloud ensures that the drawing of inventory is more accurate and error-free. Standardized shapes can be taken from a broad library and applied precisely to the point cloud. | For visualization purposes, the point cloud can also be used as the basis for photorealistic renderings or video creation. For example, impressive “fly through” videos can be created using a modeled 3D environment. Another application is the creation of digital 3D tours. | 3D printing is another option for further processing. By creating a meshing from the point cloud, surfaces are generated that can be converted into a 3D printable format. |