Tutorial - Registrierung von Scans in FARO Scene

TitleWie die Registrierung von Scans in FARO Scene funktioniert
Die Registrierung von Scans ist ein essenzieller Schritt bei der Verarbeitung von Laserscandaten in FARO Scene. Hierbei werden einzelne Punktwolken zusammengeführt, um eine vollständige und präzise Gesamtpunktwolke zu erzeugen. Je nach Anforderungen und verfügbarem Referenzmaterial stehen verschiedene Methoden der Stationierung zur Verfügung. In diesem Tutorial stellen wir Ihnen die drei gängigsten Methoden vor – von der manuellen bis hin zur automatischen Registrierung – und erläutern deren Unterschiede sowie Anwendungsbereiche.
In diesem Tutorial erläutern wir Ihnen das Registrieren von Scans in der Software FARO Scene. Mit dieser Software lassen sich die einzelnen Laserscandaten (Punktwolken) zu einer Gesamtpunktwolke zusammenführen und darstellen.
Natürlich gibt es immer mehrere Wege, die zum Ziel führen. Darunter fallen die drei Arten der Stationierung unserer Scans:
- Manuelle Stationierung mit Zielmarken
- Automatische Stationierung mit Zielmarken
- Automatische Stationierung mit Draufsicht und Cloud2Cloud-Registrierung
Die drei Arten der Stationierung (Registrierung)
Für die Stationierung sind drei Arten wählbar:
- Zielmarkenbasierte Stationierung
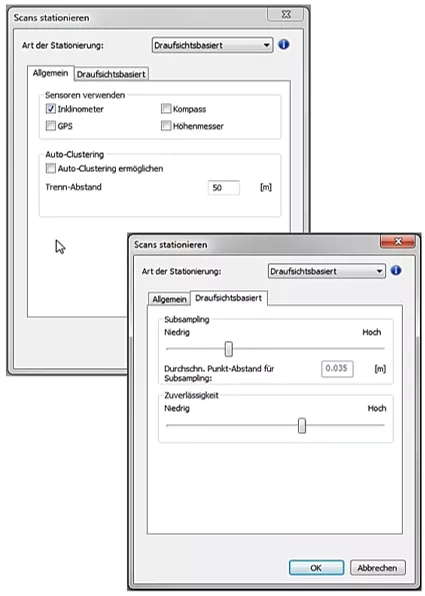
- Draufsichtbasierte Stationierung
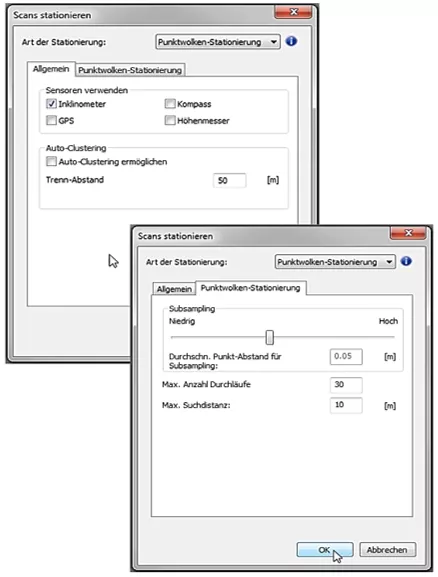
- Punktwolken-Stationierung
Für die zielmarkenbasierte Stationierung werden Referenzen (Zielmarken wie Referenzkugeln und Checkerboard Targets) benötigt, um die Scans zu stationieren. Diese werden durch Kennzeichnung als Referenzmarken in ihrer Lage und Höhe bestimmt. FARO Scene rechnet die Scans zusammen und sucht dabei eine Korrespondenz der Referenzen zueinander.

Die draufsichtbasierte Stationierung der Scans nutzt die Scanpunktwolke mit Blick von oben, d. h. die Draufsicht. Bei dieser Form der Stationierung werden keine Referenzen benötigt. Die Scans werden bei diesem Verfahren jeweils miteinander verglichen; identische Scanpunkte in den Scans werden dann für die Registrierung genutzt.
Die Punktwolken-Stationierung (C2C - Cloud To Cloud) funktioniert ähnlich der draufsichtbasierenden Stationierung. Auch hier werden Flächen der einzelnen Scans nach übereinstimmenden Scanpunkten abgesucht. Stimmt die Anzahl an Übereinstimmungen, werden die Scans zusammengefügt. Im Unterschied zur draufsichtbasierten Stationierung wird hier die gesamte Punktwolke zur Stationierung herangezogen.
Das Beispielprojekt
Als Beispiel dient uns in diesem Tutorial ein Scan-Projekt einer Kirche, welche im Innen- sowie im Außenbereich erfasst wurde. Das Objekt ist mit dem 3D-Scanner Focus 3D X 130 von der Firma FARO erfasst und in der dazugehörigen Software FARO Scene 5.4 registriert worden.
Die aktuelle Version von FARO Scene ist die 5.5. In der Bearbeitungsweise sind die Versionen aber identisch.
Bei der Erfassung der Kirche sind ausschließlich künstliche Referenzen - in diesem Fall Laserscanning-Referenzkugeln und Schachbrettzielmarken - zum Einsatz gekommen.
Wir unterscheiden zwischen künstlichen und natürlichen Referenzen:
- Künstliche Referenzen können sein: Kugeln, Schachbrettzielmarken, Kreiszielmarken
- Natürliche Referenzen können sein: Wände, Flächen, einzelne Scanpunkte im Scan (Pixel), Ecken
Weiterlesen…
> Voreinstellungen für ein zuverlässiges Arbeiten mit FARO Scene
> Manuelle Stationierung (Registrierung) der Scans mit Zielmarken in FARO Scene
> Automatische Stationierung (Registrierung) der Scans mit Zielmarken in FARO Scene
Wir bieten Ihnen Schulungen zu Scannern und Software an. Kontaktieren Sie uns, oder schauen Sie nach unseren Angebot.