Prozessoptimierung mit Hilfe von 2D-Hallenplänen

TitleEffiziente Produktionsplanung – Wie Growe mit aktuellen Hallenlayouts die Fertigung optimiert
Die Firma Growe aus Barßel ist ein führender Produzent für Rollladen- und Sonnenschutzsysteme. Als produzierendes Unternehmen ist stets von Interesse, die Fertigungsprozesse zu optimieren. Die technische Leitung entschied sich neue Wege zu gehen: Es sollten aktuelle Hallenlayouts angefertigt werden, die sämtliche Maschinen, Lagerpositionen und weiteres Inventar enthalten. Diese spiegeln dann die aktuelle Situation wieder und dienen als Datengrundlage für eine mögliche Produktionsoptimierung. Die Produktion der Rolladen- und Sonnenschutzsysteme befindet sich in vier Hallen auf einer Gesamtfläche von rund 4.000 m².
Die Umsetzung
Für die Anfertigung der Aufstellungspläne genügt eine Messgenauigkeit von einigen Zentimetern. Daher fällt die Wahl des einzusetzenden Messgeräts schnell auf den mobilen Laserscanner „ZEB Revo RT“ von GeoSLAM. Dieses Messsystem ermöglicht eine effiziente und zugleich präzise Datenerfassung.
Die Vermessung erfolgte nach Produktionsschluss, um Ghosting-Effekte in den Scandaten zu vermeiden. Insgesamt wurde für die Erfassung der vier Produktionshallen (4.000 m²) etwas mehr als eine Stunde benötigt – ein wahrer Zeitvorteil im Vergleich zu anderen Scansystemen.
Pro Produktionshalle wurde ein Scan gestartet. Da drei der Hallen über Durchgänge untereinander verbunden sind, wurde an diesen Stellen auf eine ausreichende Überlappung geachtet, damit die verschiedenen Scans im Nachgang zu einer großen Punktwolke verbunden werden können. Während der Erfassung wurde über die im ZEB-Revo RT integrierte Kamera ein Videostream aufgezeichnet. Das Video hilft den Zeichnern/Modellierern bei der Orientierung in der Punktwolke und der Klassifikation des gesamten Inventars.
Die Vorbereitungen für die Planerstellung
Die Auswertung der Daten erfolgte mit Hilfe der Software-Lösungen GeoSLAM HUB und GeoSLAM DRAW/PointCab.
Das Verarbeiten der einzelnen Scans setzt sich aus folgenden Arbeitsschritten zusammen:
- Herunterladen der Scandaten vom ZEB-Revo RT über die WLAN-Schnittstelle
- Entpacken und Post-Processing der einzelnen Scans (mit GeoSLAM HUB)
- „Merging“ (d. h. Zusammenfügen) von einzelnen sich überlappenden Scans zu einem großen Gesamtscan (mit GeoSLAM HUB)
- Erstellung eines Geoslam Draw- oder PointCab-Projektes, um später bei der Planerstellung einfache Schnitte und Grundrisse generieren zu können (mit GeoSLAM HUB)
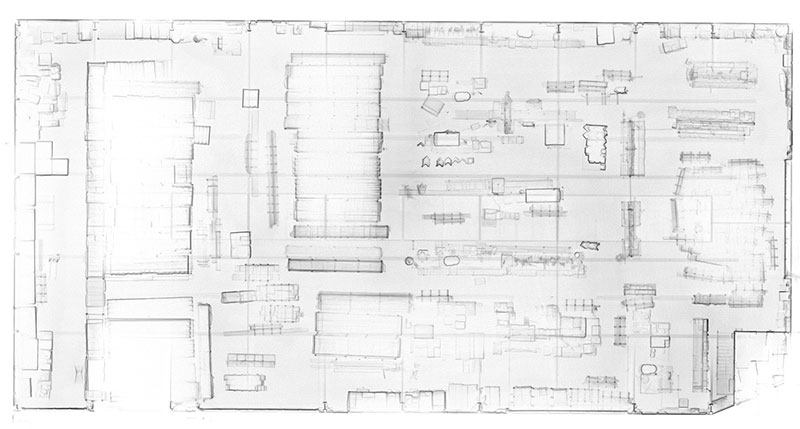
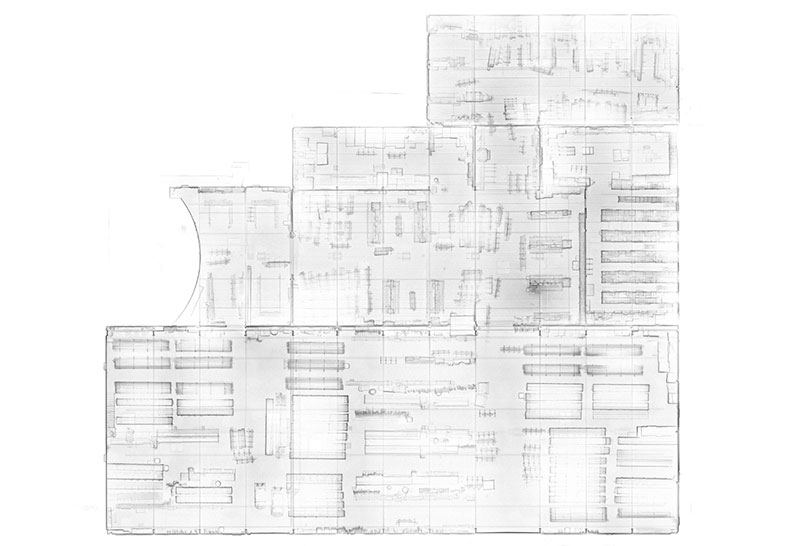
Die Planerstellung
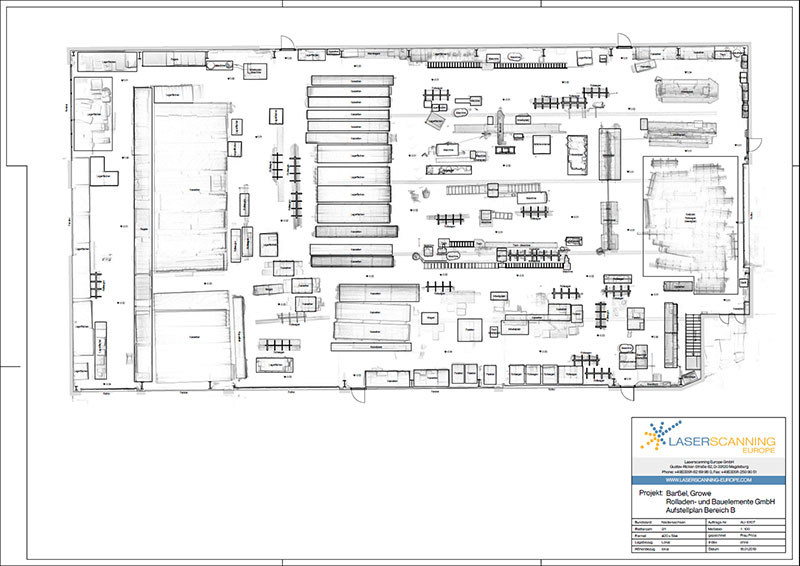
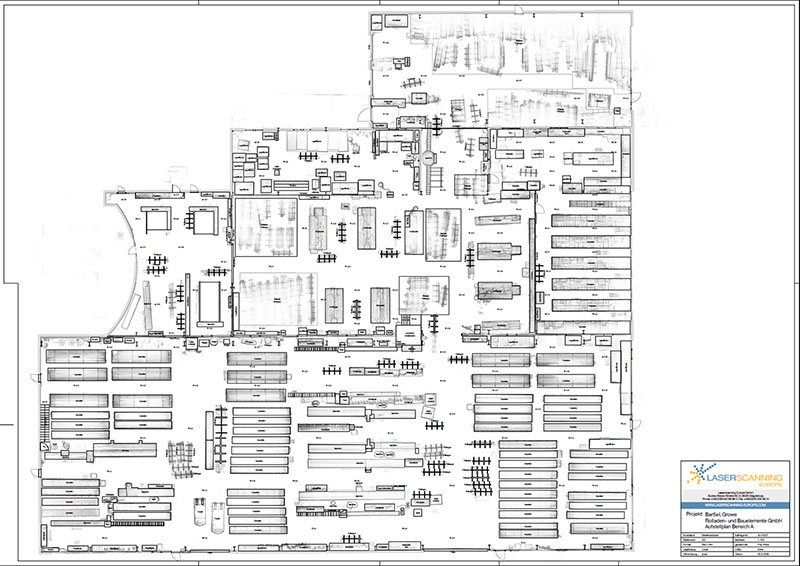
Die Ergebnisse
Die Ergebnisse haben die Erwartungen des Kunden übertroffen. Ein entscheidender Vorteil gegenüber dem Aufmaß per Hand ist die Schnelligkeit, mit der die Produktionshallen erfasst werden konnten. Die Produktion musste nicht unterbrochen werden, da die Pausenzeiten in den einzelnen Produktionsbereichen für das Aufmaß ausreichend waren. Dadurch dass der GeoSLAM-Scanner im Vergleich zu einem terrestrischen Laserscanner wesentlich geringere Datenmengen generiert, beschleunigt sich auch der Prozess der Auswertung enorm, sodass bereits kurz nach dem Aufmaß mit dem Zeichnen der Pläne begonnen werden konnte.
Die fertigen Pläne dienen nun einem Spezialisten für Produktionsoptimierung als Grundlage für eine verbesserte Aufstellung der Anlagen und Arbeitstische.
Die Scanner von GeoSlam sind nicht mehr erhältlich. Wir bieten Technik der neuen Generation an. Fragen Sie uns, falls Sie Fragen haben.